Základní škola zaměřená na výuku anglického jazyka


Základní škola zaměřená na výuku anglického jazyka

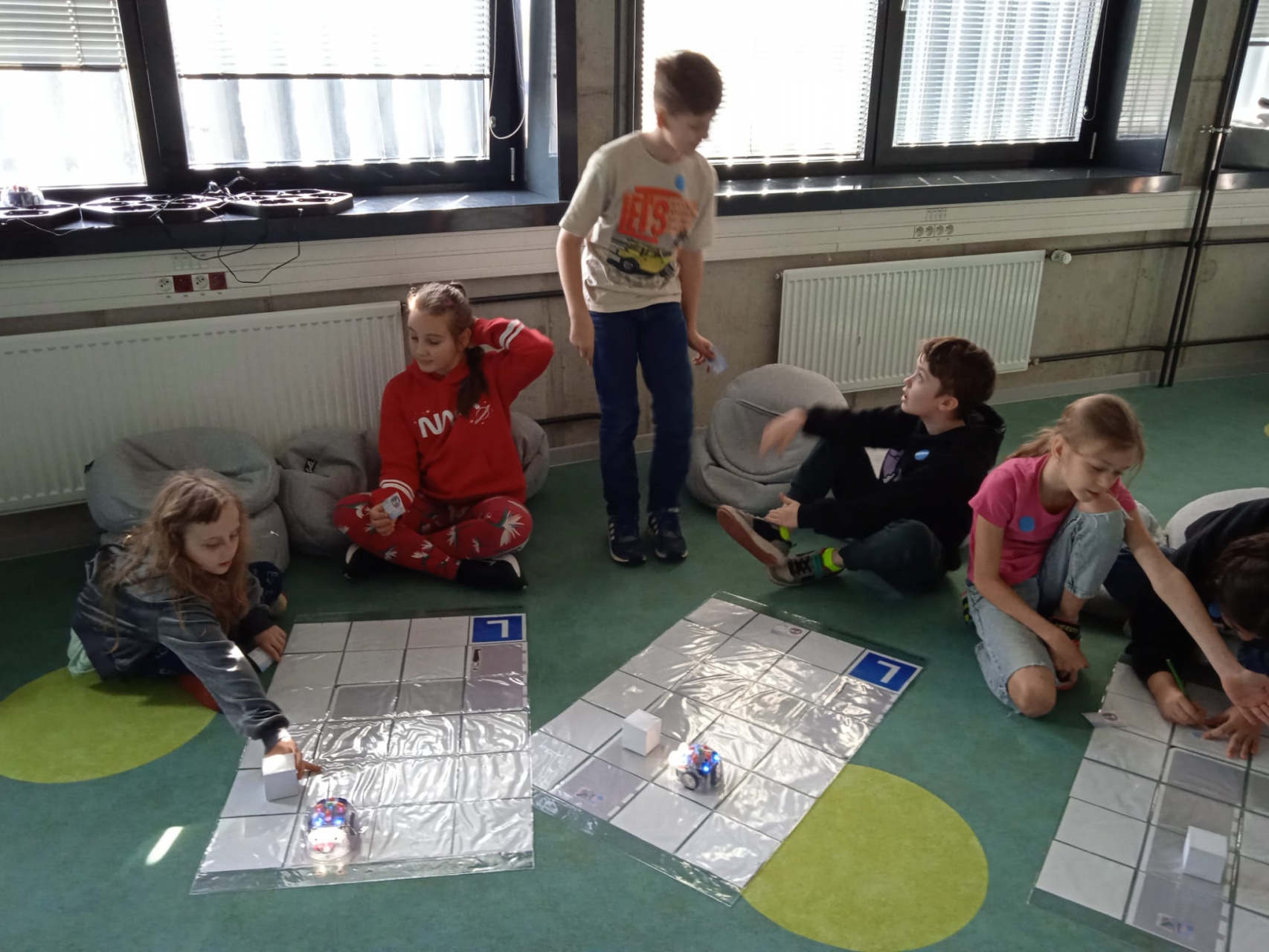
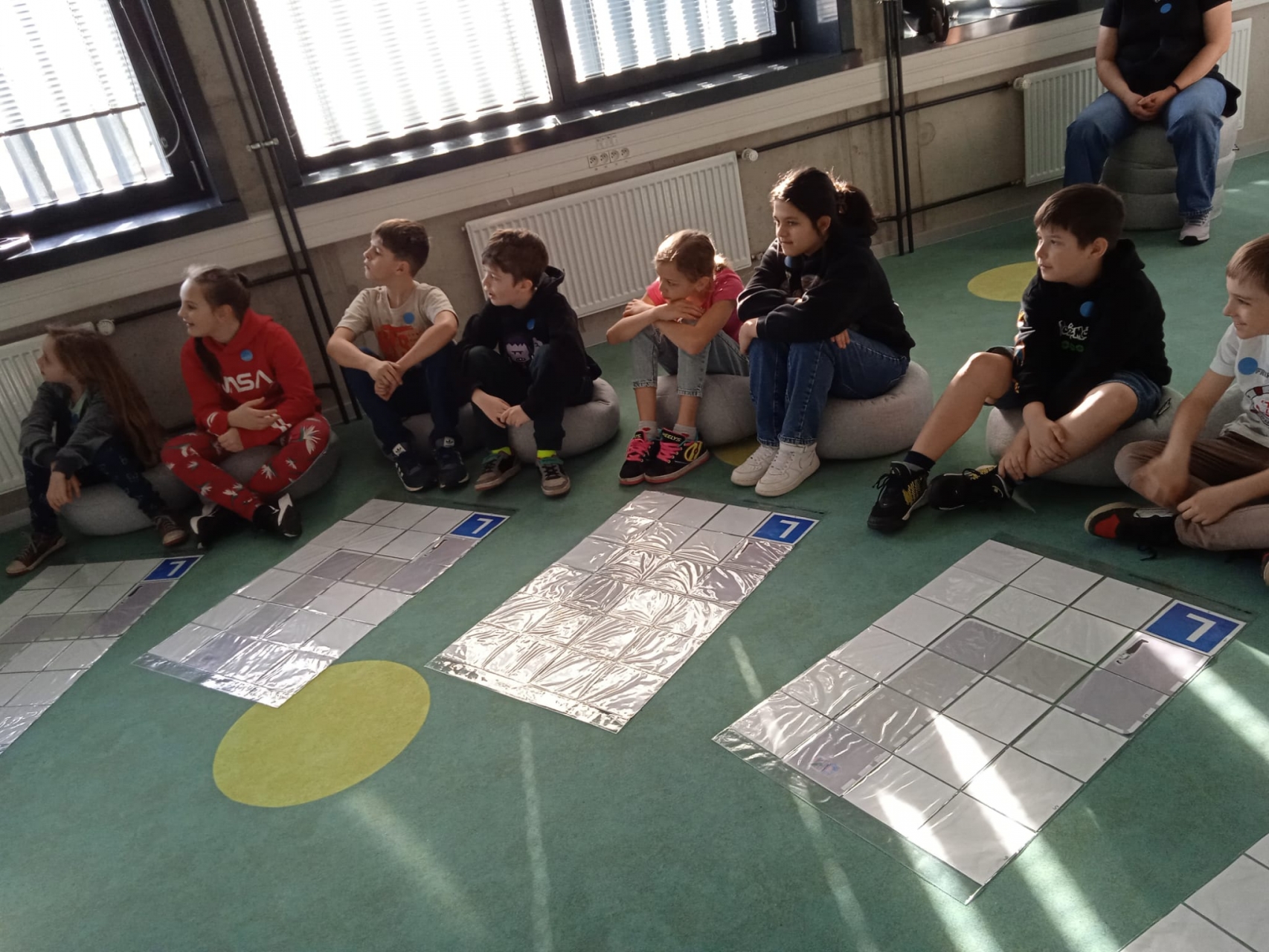
V dubnu byla 3.C v Dolní oblasti Vítkovic, děti si hrály s robotky a učily se je programovat. Moc je to bavilo.